
 Мы продолжаем искать новые и интересные формы для соревнований среди роботов. Сегодня мы представляем вам прототип «Охоты». Охота основана на идее кегельринга: за определенной время необходимо вытолкнуть предметы за пределелы ринга.
Мы продолжаем искать новые и интересные формы для соревнований среди роботов. Сегодня мы представляем вам прототип «Охоты». Охота основана на идее кегельринга: за определенной время необходимо вытолкнуть предметы за пределелы ринга.
Соревнование состоит из 3 частей:
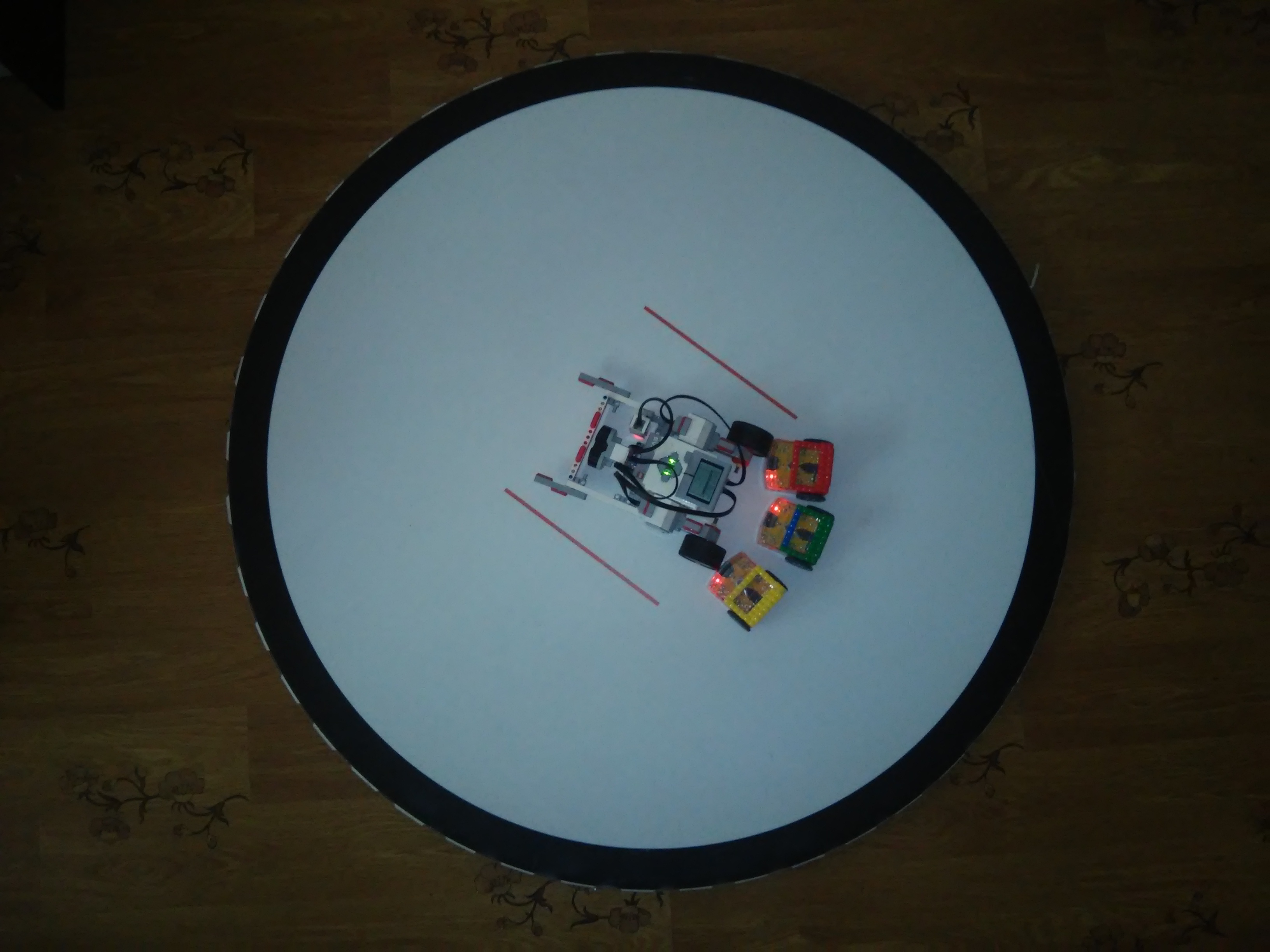
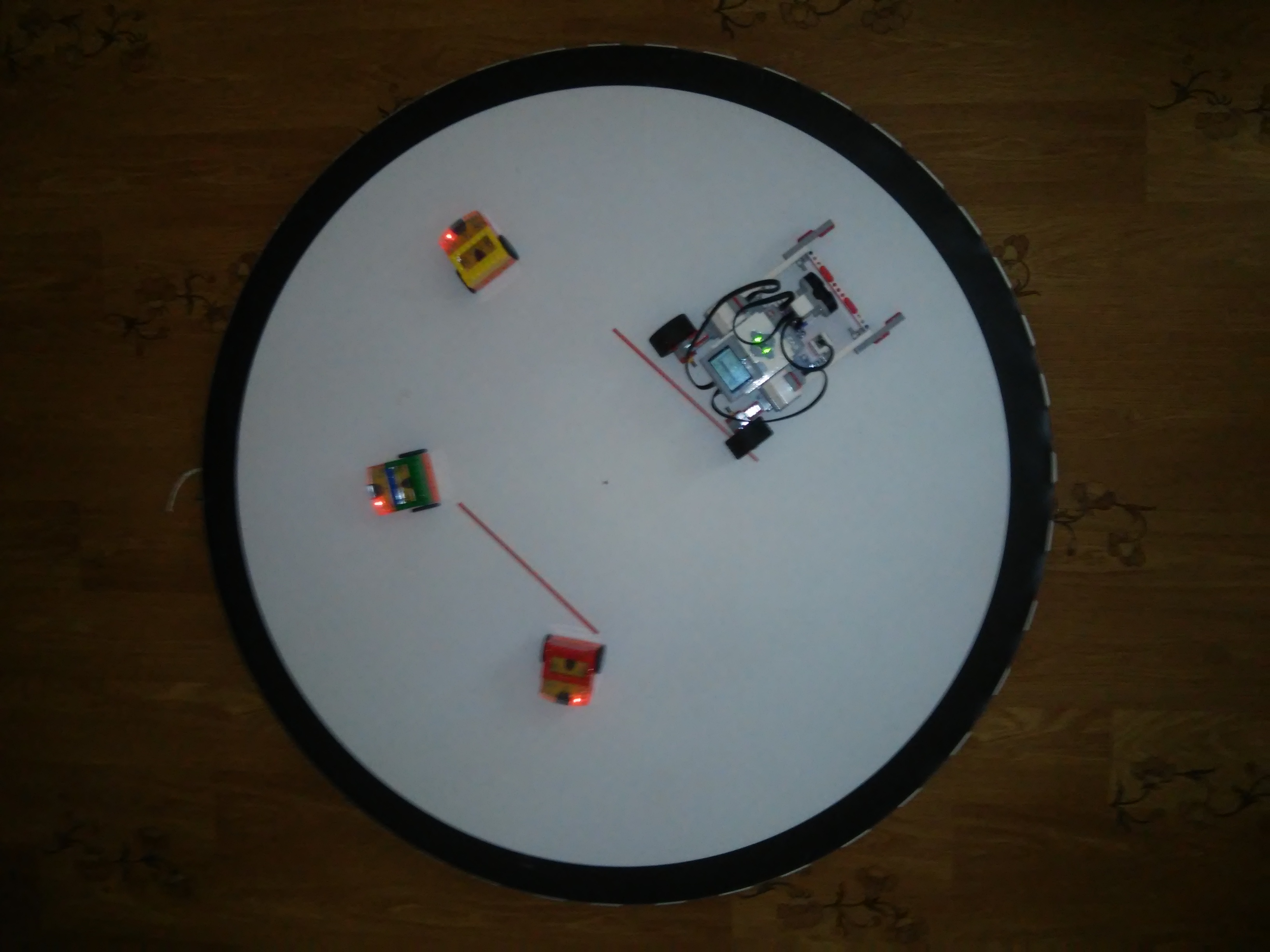
1) Место для охоты, лес (ринг от сумо)
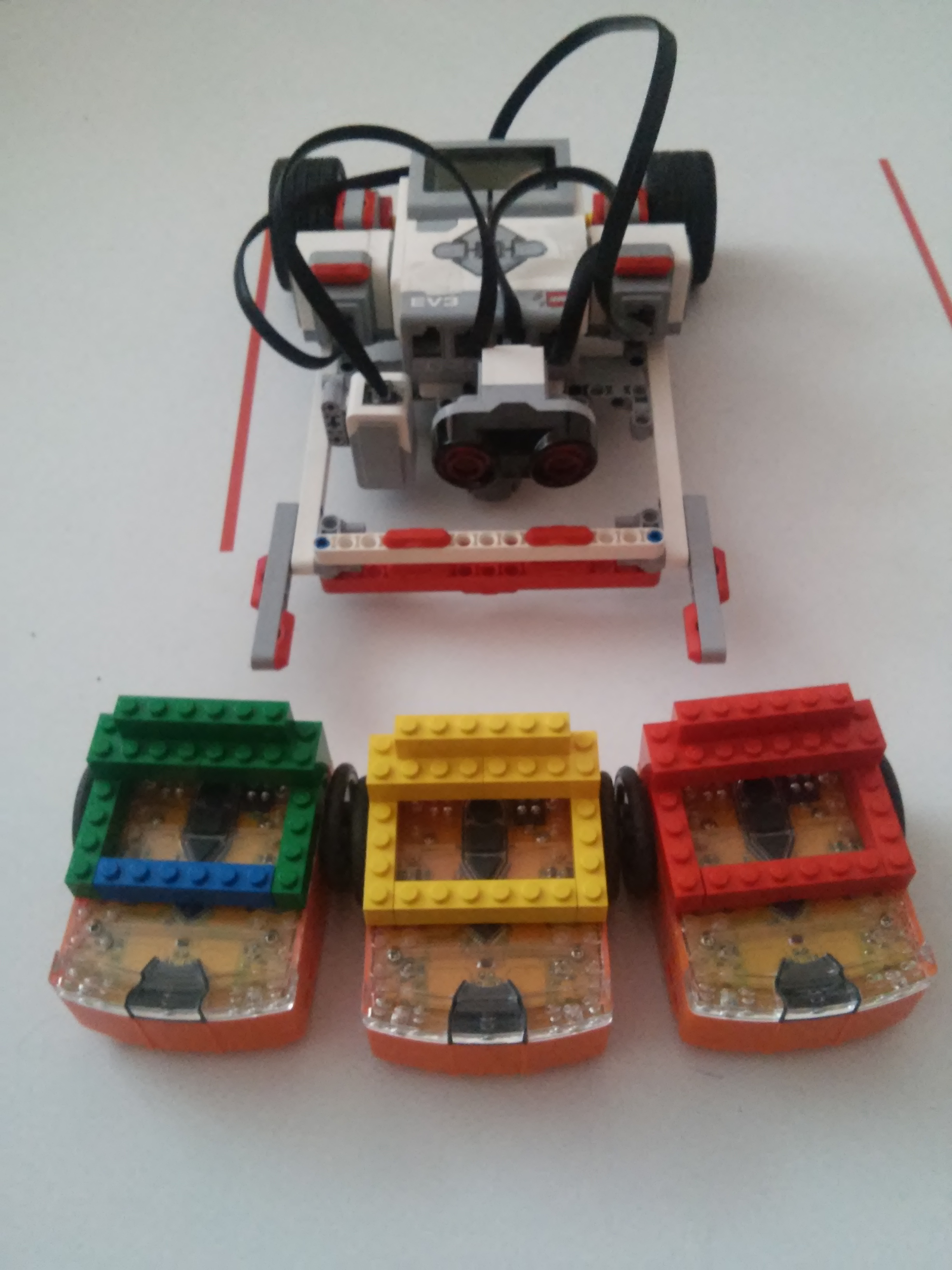
2) Звери, которые живут в лесу (роботы на базе Edison)
3) Охотник — робот на базе Ev3.
Цель охотника — выследить зверей в лесу (при помощи датчика расстояния) и произвести «выстрел» (вытолкнуть за пределы границы ринга). Чей охотник справится быстрее, тот и победил.
Соревнование может состоять из нескольких попыток. Каждая попытка может отличаться различной стартовой расстановкой роботов на ринге (аналогично кегельрингу).
Особое внимание хотим уделить «зверям», которые сделаны из Edison. В нашем случае 3 зверя, которые имеют свое специфическое поведение. Каждый зверь имеет цветовой маркер.
Зеленый — самый быстрый зверь в лесу, он двигается по рингу с максимальной скоростью.
Желтый — имеет среднюю скорость движения.
Красный — самый медленный зверь, движется с минимальной скоростью.
Так как «звери» программируемые, то можно придумать много разных подвидов соревнований. Например, если каждому типу зверя присвоить балы (зеленый — 20, желтый — 10, красный — 5), то победителя можно определять по «ценности» собранных зверей.
Каждому зверю можно сделать персональный алгоритм поведения. Например, 5 секунд зверь бежит с максимальной скоростью, потом 8 секунд стоит на месте (отдыхает), потом опять бежит но с меньшей скоростью.
Для другого зверя можно задать пассивную манеру поведения в лесу. Он стоит на месте, «крутит головой» (врщается) в поисках охотника и когда увидел охотника, начинает убегать от него в противоположную сторону.
Хотите «поохотиться» вместе с нами? Обращайтесь по нашим контактам.