
 Практически ни один день человека не обходится без штрих-кодов, которые в основном используются для маркировки товаров. Так же штрих-код используется Edison для активации стандартных программ. Мы решили сделать считыватель штрих-кодов на базе Lego Ev3. Но сделали мы это в игровой форме, что позволит в будущем использовать наши прототипы для соревнований по робототехнике.
Практически ни один день человека не обходится без штрих-кодов, которые в основном используются для маркировки товаров. Так же штрих-код используется Edison для активации стандартных программ. Мы решили сделать считыватель штрих-кодов на базе Lego Ev3. Но сделали мы это в игровой форме, что позволит в будущем использовать наши прототипы для соревнований по робототехнике.
Первым делом мы придумали свой упрощенный стандарт штрих-кода и сделали генератор кодов в Excel. Наш код состоит из 6 элементов (битов, полос) одинаковой ширины. Первый и последний бит всегда единица (старт и стоп биты). 2-5 биты — биты данных, которые позволяют закодировать максимум 16 уникальных значений. Код может обозначать разные сущности: цвет, число, направение движения, букву и т.п. Мы решили остановиться на двух вариантах использования штрих-кодов роботами.

В данном примере задача робота достаточно проста. Ему необходимо считать последовательно два штрих-кода. В каждом штрих-коде закодирована цифра при помощи обычной двоичной системы. После считывания кодов робот должен сложить два полученных числа и вытолкнуть с линии кеглю, соотвествующую полученному результату. После выталкивания кегли, робот возвращается на свою траекторию и продолжает движение до последней кегли (в нашем случае это кегля номер 5).
Мы провели много экспериментов, но в качестве демонстрации предлагаем два. В первом случае штрих-коды обозначают числа 1 и 3, и робот должен вытолкнуть 4 кеглю. Во втором варианте штрих-коды обозначают числа 0 и 2, и робот должен вытолкнуть кеглю 2.
В качестве усложнения этого примера можно расширить штрих-коды математическими знаками между числами. Таким образом робот сможет вычислять не фиксированную формулу сложения, а целые последовательности (сложение, вычитание, деление и т.п.). Так же недостатком нашего подхода является то, что робот заранее запрограммирован считывать 2 кода. Решить эту проблему можно используя специальный штрих-код, который бы обозначал «конец формулы» (например, знак равно «=»). Таким образом можно выстраивать длинные цепочки без перепрограммирования робота.
Пример программы находится в архиве под названием «hitTargetIndex».

В данном примере задача робота — это пройти путь от начала до конца по указателям направления движения, которые закодированны штрих-кодами, чтобы обойти препятствия, не зацепив их. Всего мы выбрали 4 основных штрих-кода: влево, вправо, вперед, разворот. Для каждого действия используется штрих-код (см генератор штрих-кодов) с одним битом данных, который и определяет направление.
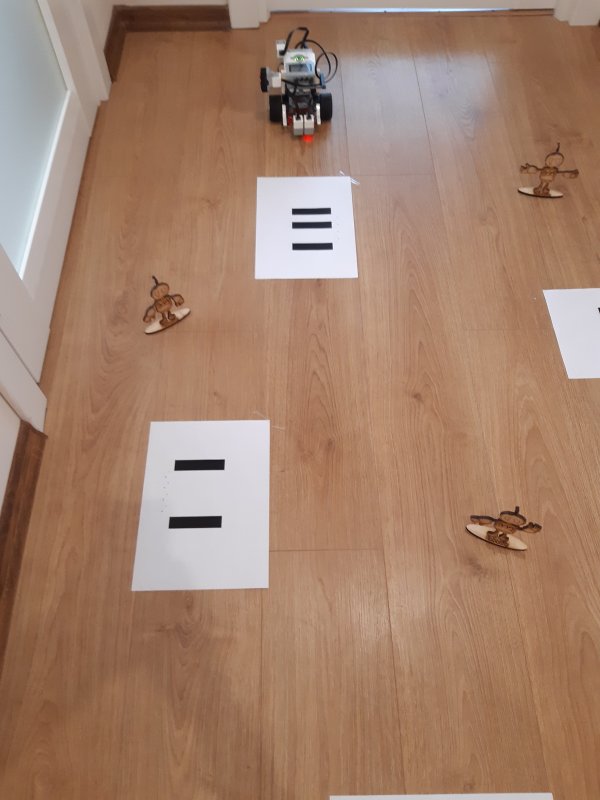 Особенностью действия «разворот» является то, что считав такой код («назад»), робот разворачивается на 180 градусов и продолжает движение вперед, тем самым имея возможность считывать новые коды в правильном направлении. Так же мы использовали один технический код (пусто, ноль), который обозначает точку финиша и, считав такой код, робот должен остановиться, закончив свой путь.
Особенностью действия «разворот» является то, что считав такой код («назад»), робот разворачивается на 180 градусов и продолжает движение вперед, тем самым имея возможность считывать новые коды в правильном направлении. Так же мы использовали один технический код (пусто, ноль), который обозначает точку финиша и, считав такой код, робот должен остановиться, закончив свой путь.В процессе работы над этим примером у нас возникли некоторые сложности с тем, что роботу тяжело преодолеть стабильно весь путь от начала до конца. Связано это с тем, что точность поворотов не очень высокая и иногда робот не попадает точно по штрих-коду. Один из вариантов, как исправить такую проблему — это сделать штрих-коды шире (на всю ширину листа А4), тем самым обеспечив запас на ошибки движения робота.
Пример программы находится в архиве под названием «index».
У нас есть еще много идей, как использовать штрих-коды в робототехнике, но мы не хотим раскрывать их раньше времени. Надеемся, что некоторые из них буду реализованы в виде соревнований и позволят весело провести время.
Материалы для скачивания
Генератор скан-кодов для Excel
Пример программ для EV3 по использованию штрих-кодов.