 Сегодня мы представляем результаты наших небольших экспериментов с датчиком звука. В версии EV3 набор не имеет такого датчика. Но датчик звука от предыдущей версии (NXT-2) совместим аппаратно и программно. Так что мы раздобыли один такой датчик и подключили его к простому роботу на базе EV3. Мы придумали несколько способов, как использовать датчик звука в автоматизированных или роботизированных системах. Некоторые могут служить прототипов для использования в реальной жизни, некоторые больше подходят для развлечения.
Сегодня мы представляем результаты наших небольших экспериментов с датчиком звука. В версии EV3 набор не имеет такого датчика. Но датчик звука от предыдущей версии (NXT-2) совместим аппаратно и программно. Так что мы раздобыли один такой датчик и подключили его к простому роботу на базе EV3. Мы придумали несколько способов, как использовать датчик звука в автоматизированных или роботизированных системах. Некоторые могут служить прототипов для использования в реальной жизни, некоторые больше подходят для развлечения.
У нас есть австралийский простой робот «Edison» со встроенным датчиком звука. И у него есть предустановленная программа для управления звуком, а точнее хлопками. Мы решили воспроизвести это для нашего EV3. Суть программы достаточно проста: один хлопок — робот делает поворот, двойной хлопок — робот едет вперед.
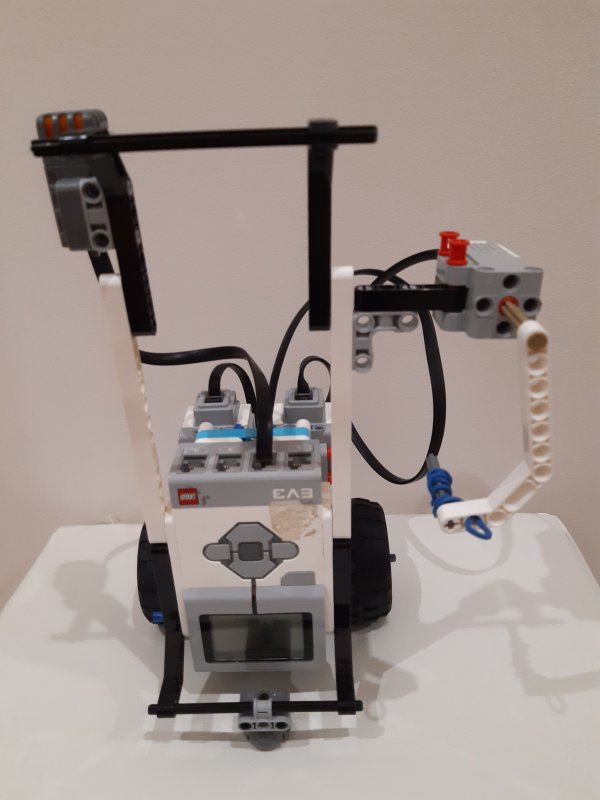
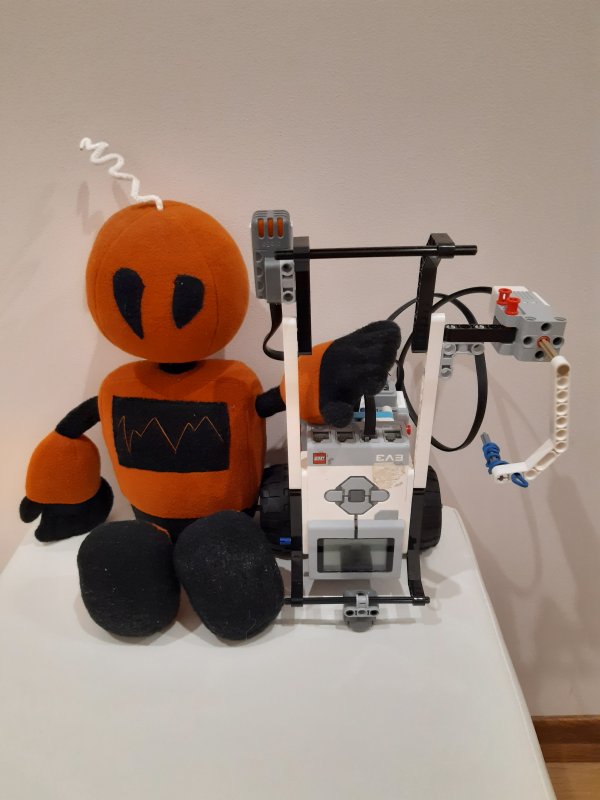
Следующий наш эксперимент заключался в измерении уровня звука (шума), который производят разные предметы, приборы или процессы. Мы добавили в конструкцию средний мотор, который управлет рукой робота. Робот показывает уровень внешнего звука (шума) поднимая руку. Чем выше поднята рука, тем выше уровень звука. Наш выбор остановился на: прыгающих резиновых мячиках, пылесосе, электрической помпе для воды, заводной механической хеловинской игрушке.
Также мы попробовали научить робота танцевать под песню из кинофильма «Приключения Электроника».
Так же при помощи робота с датчиком звука можно весело провести время в компании друзей, проведя «веселые шумные старты». Мы показания датчика звука напрямую передаем в «скорость» двигателей и чем громче звук, тем быстрее едет робот. Необходимо отметить длинный участок метками старта и финиша. Каждый участник должен при помощи звуков (крик, хлопки, свист и т.п.) провести робота до финиша. Кто это сделал за меньшее время, то победил.