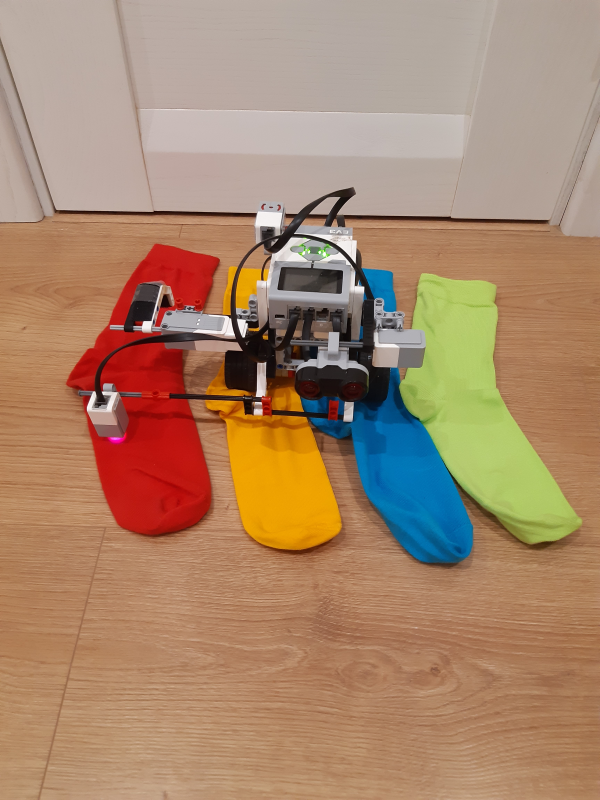
Сегодня рассказ пойдет о нашем новом роботе, которого зовут Носкобот. Наша семья очень любит веселые цветные носки и у нас их огромное количество. Самое скучное занятие — это составлять пары носков после стирки. Так у нас и появилась идея сделать прототип робота, который бы помогал управляться с носками. Для экспериментов мы купили однотонные носки и оказалось, что датчик цвета даже их распознает (именно по цветам).
 Следующим этапом было сделать манипулятор для транспортировки носков. Мы собрали манипулятор из лего, но оказалось, что он с трудом может захватить носок и часто теряет его по дороге. Так как у нас нет большого опыта в манипуляторах, то мы решили пойти другим путем. Мы сделали простую крутилку и на нее закрепили одежную липучку. Ряд опытов показал, что в таком подходе есть всего один недостаток — робот не может «отдать носок», так как липучка оказалась на удивление эффективной. По итогу ряда экспериментов мы остановились на двух режимах работы робота.
Следующим этапом было сделать манипулятор для транспортировки носков. Мы собрали манипулятор из лего, но оказалось, что он с трудом может захватить носок и часто теряет его по дороге. Так как у нас нет большого опыта в манипуляторах, то мы решили пойти другим путем. Мы сделали простую крутилку и на нее закрепили одежную липучку. Ряд опытов показал, что в таком подходе есть всего один недостаток — робот не может «отдать носок», так как липучка оказалась на удивление эффективной. По итогу ряда экспериментов мы остановились на двух режимах работы робота.
Есть набор носков разного цвета. Есть носок (первый в ряду), для которого необходимо найти пару по цвету. Как только робот находит носок необходимого цвета, он его «захватывает» и относит к месту, где лежит первый носок.
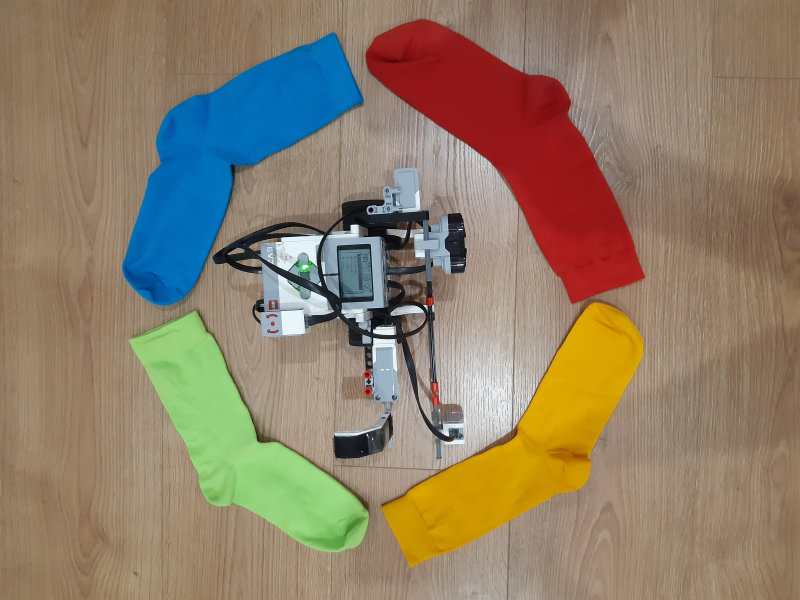
Цель — определить в ряду носков непарный и «удалить» из набора. Непарным считается носок, для которого нет пары. Например, 1-3-5 носков одного цвета. В данном случае робот двигается до препятствия (признак, что носков больше нет) и подсчитывает пары. Потом двигается назад и ищет первый непарный носок. Найдя его, робот захватывает его и транспортирует его на точку старта.
Вот такое фан-видео мы подготовили в качестве развлечения.