
 Edison — простой робот со встроенными датчиками. Он позволяет сосредоточиться на программировании и работе с датчиками. Однако это накладывает некоторые неудобства и ограничения на функциональность робота. Если в Lego EV3 в одном роботе мы можем использовать несколько разных датчиков и двигателей, то с Edison это невозможно.
Edison — простой робот со встроенными датчиками. Он позволяет сосредоточиться на программировании и работе с датчиками. Однако это накладывает некоторые неудобства и ограничения на функциональность робота. Если в Lego EV3 в одном роботе мы можем использовать несколько разных датчиков и двигателей, то с Edison это невозможно.
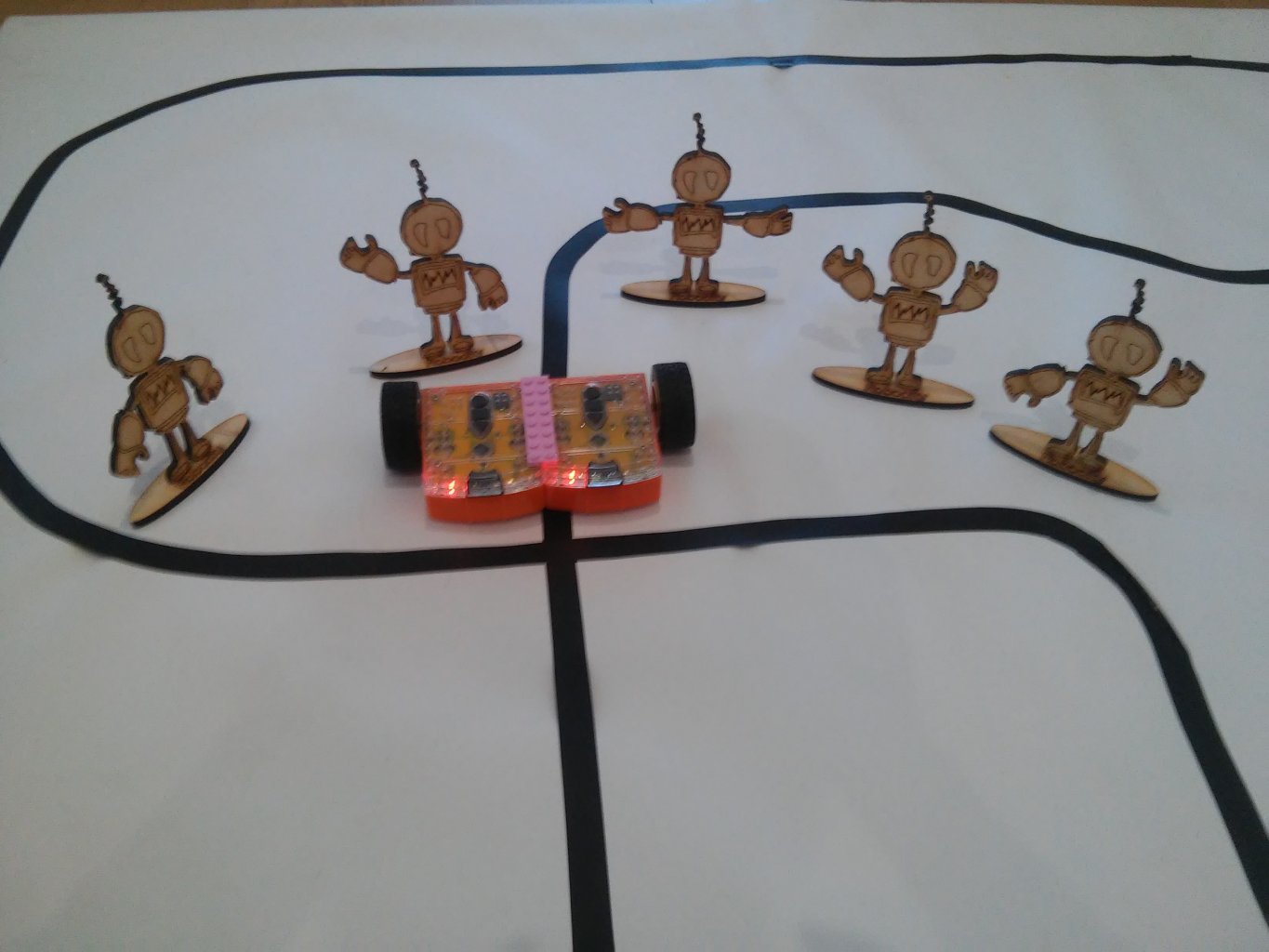
Цель нашего эксперимента — создать робота на базе Edison, который может преодолевать трассу для езды по линии быстрее (за счет двух датчиков линии) и даже более — сможет преодолевать перекрестки.
Для этого мы сняли по одному колесу с каждого робота, соединили их между собой лего деталями, при помощи черной изоленты «изготовили» поле для слалома с перекрестками и поворотами разного радиуса.
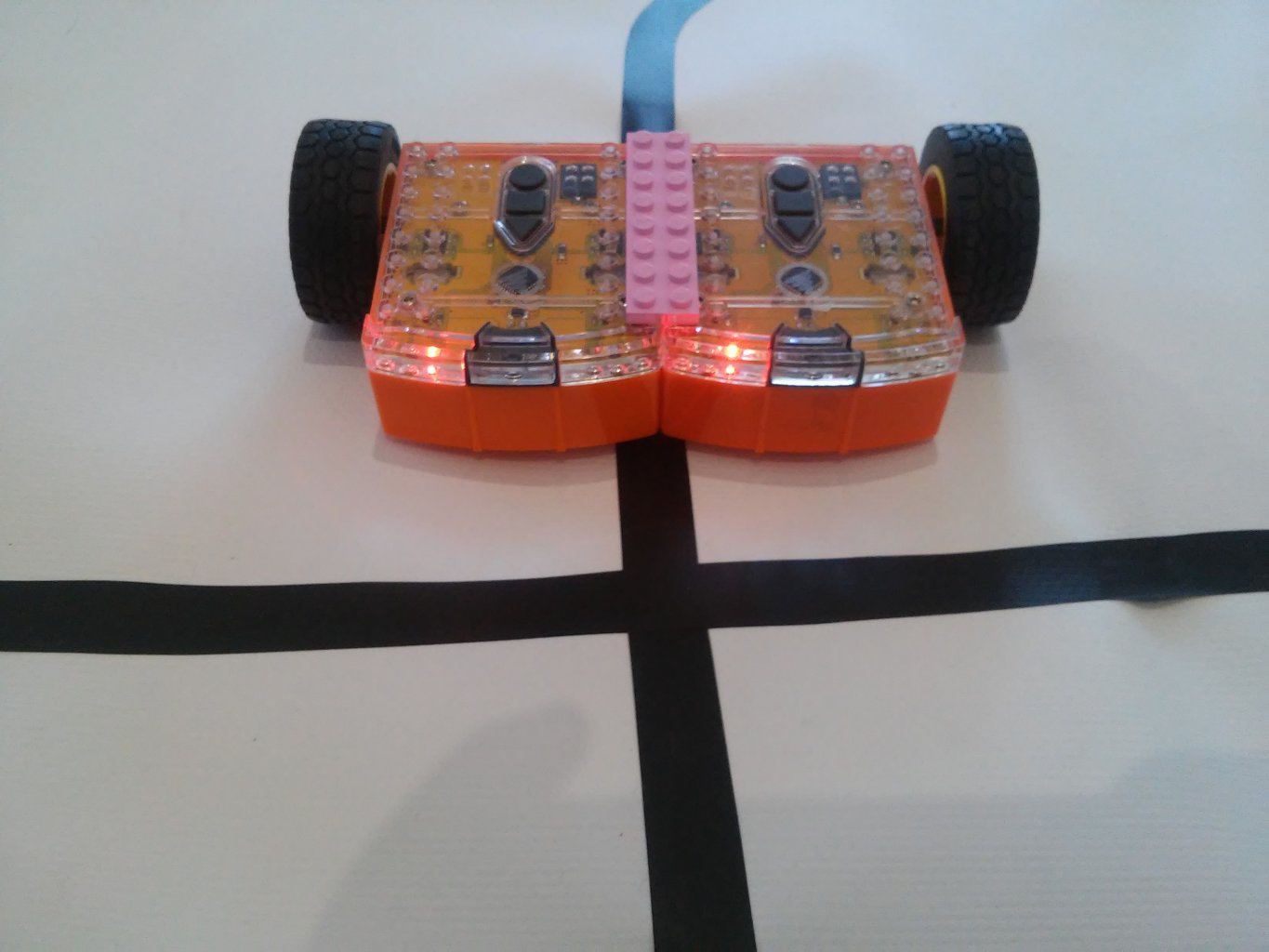
По сути Edison — это автономный робот. Нашей задачей было «заставить» двух независимых роботов работать как одна команда. Каждый робот управлял своим колесом (левым или правым) и для трассы без перекрестков все оказалось достаточно просто. Но для преодоления перекрестков встала необходимость синхронизировать работу двух роботов. Edison имеет инфракрасный передатчик и приемник, что позволяет двум роботам обмениваться информацией. Первый Edison передает показания своего датчика линии второму (если он обнаружил черный цвет), а второй принимает эти данные и, если он тоже на черной линии, отсылает первому подтверждение, а сам едет вперед. Первый, получив информацию о черном цвете от второго, тоже едет вперед. Иначе он едет назад. Таким образом если два робота на черном, они едут вперед. Если только один на черном, то они выравниваются относительно черной линии.
Результатом наших экспериментов стало то, что:
1) Робот научился проезжать перекрестки
2) Увеличилась скорость прохождения трассы за счет использования двух датчиков линии у двух разных роботов.